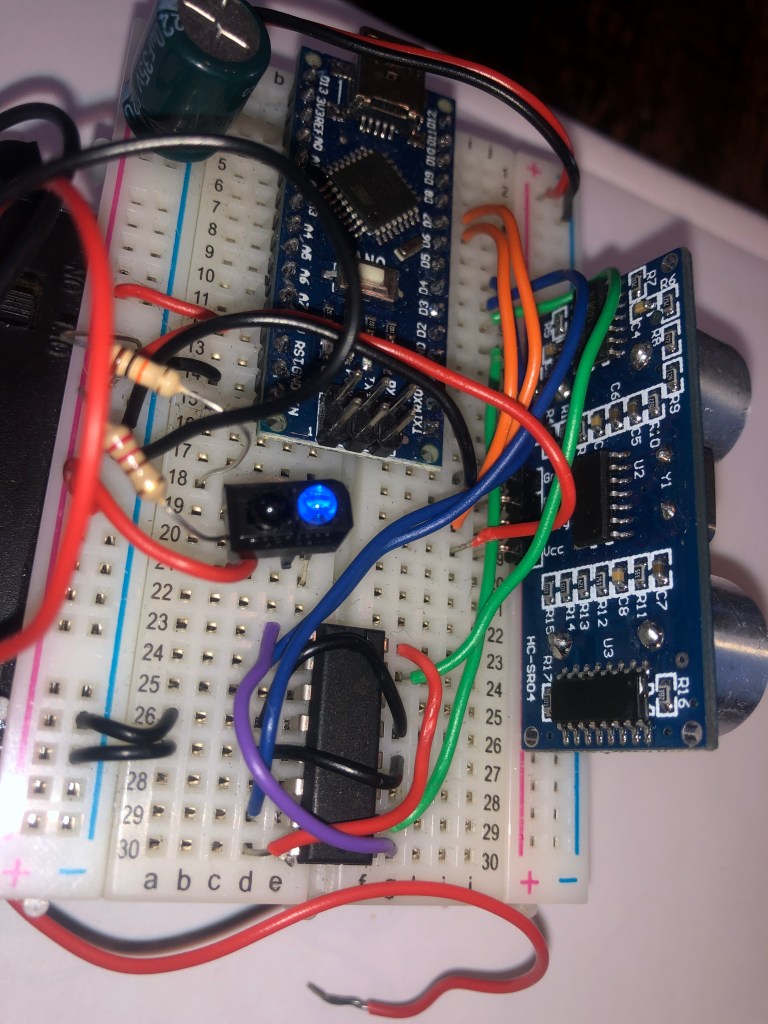
For week 6, our main objective was to wire and code the TCRT5000 colour sensor. The puropse of this was to tetect the white perimeter of the robosumo ring. Billy focused on wiring and coding the colour sensor while Myself and Ben planned the design of the chassis for the final compitition.
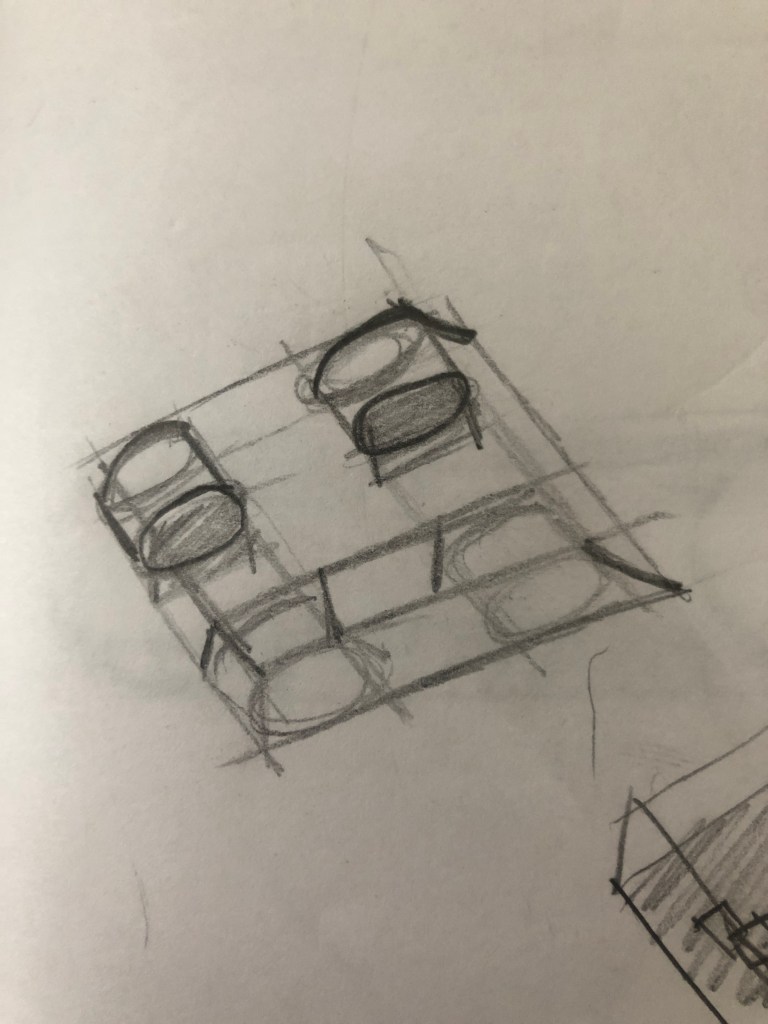
We had made the decisoion to opt for 4 motors and 4 wheels which would give is unrivaled traction, making pushing our opponents out of the ring easy. We decided having protection over the side of the body would prevent a robot beig able to get under our wheels. We knew we would be fitting a ramp to the front to lift the other robot up and push them from the ring.