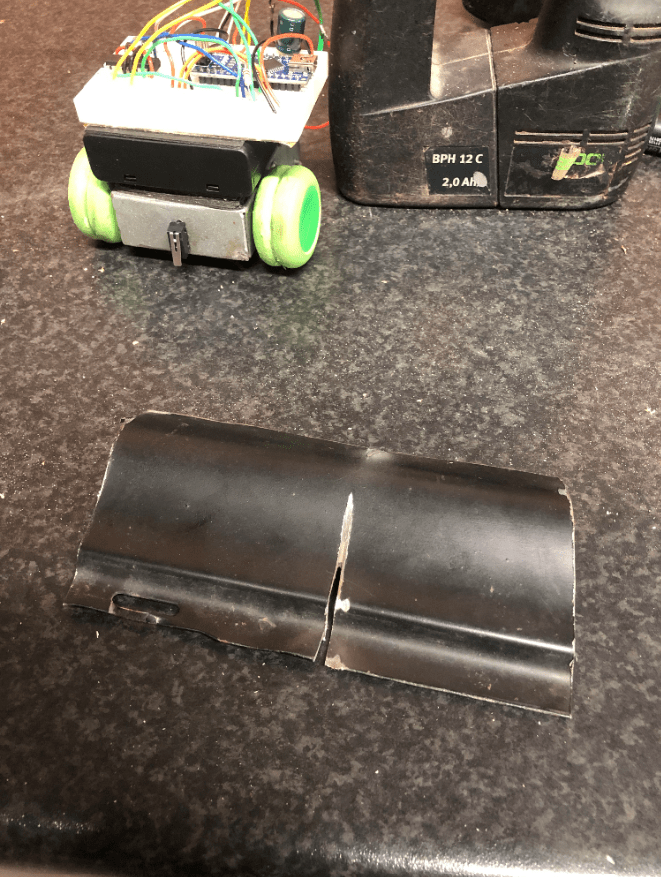
Over the weekend before the tip the can challenge, I built a front bumper for the robot out of scrap steel that started out as the door off my racecar. This was easy enough with the only difficulty being that i had to grind the metal down to make it thinner. this was so that the switch would be closed when the robot touched the can. I fitted the bumper to the robot and positioned it properly. At this point our robot was ready for action.

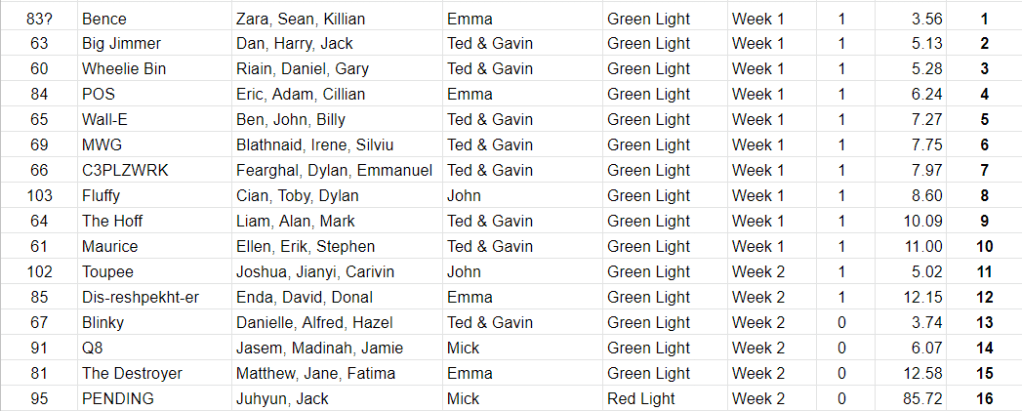
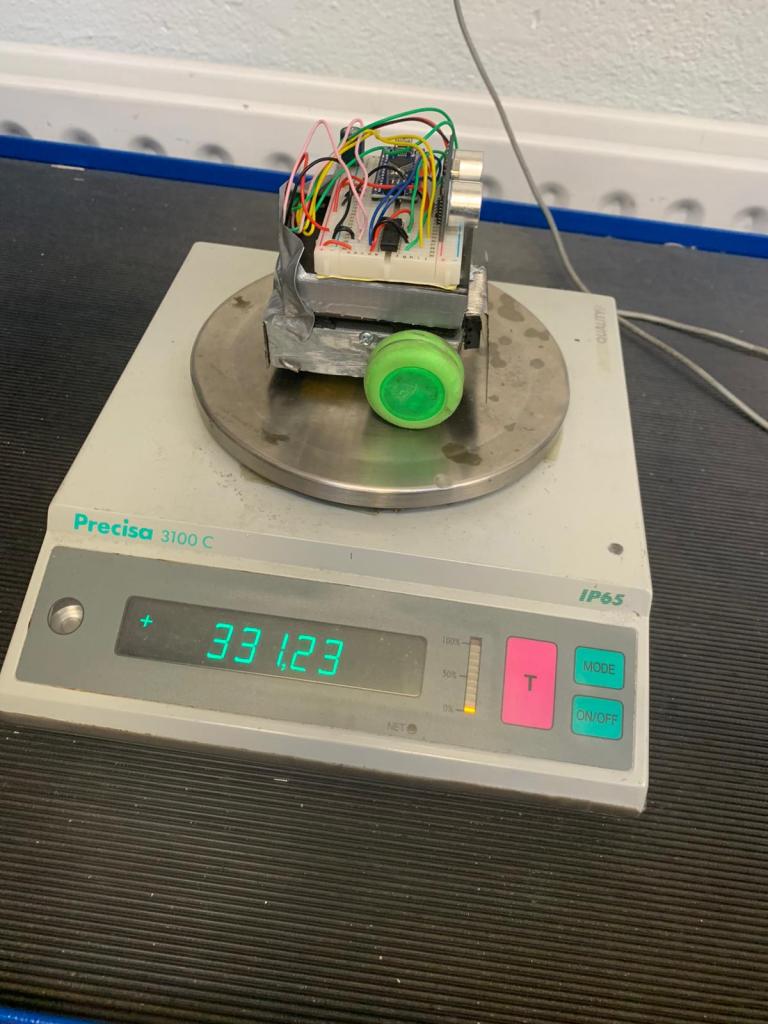
On Wednesday, We were the first team to compete the challenge after verifying our weight and size with a time of 20 seconds. We were happy that we had completed it however we knew we could do better.
We realized the RH motor was spinning faster than the LH motor so we slowed it down via pulse width modulation so that it traveled straighter. After this, our time dropped significantly but other teams had got much faster times. I decided the easiest way was to increase the wheel diameter, gearing up the robot. Given the limited resources, we wrapped folded paper around the wheel and wrapped that in tape.
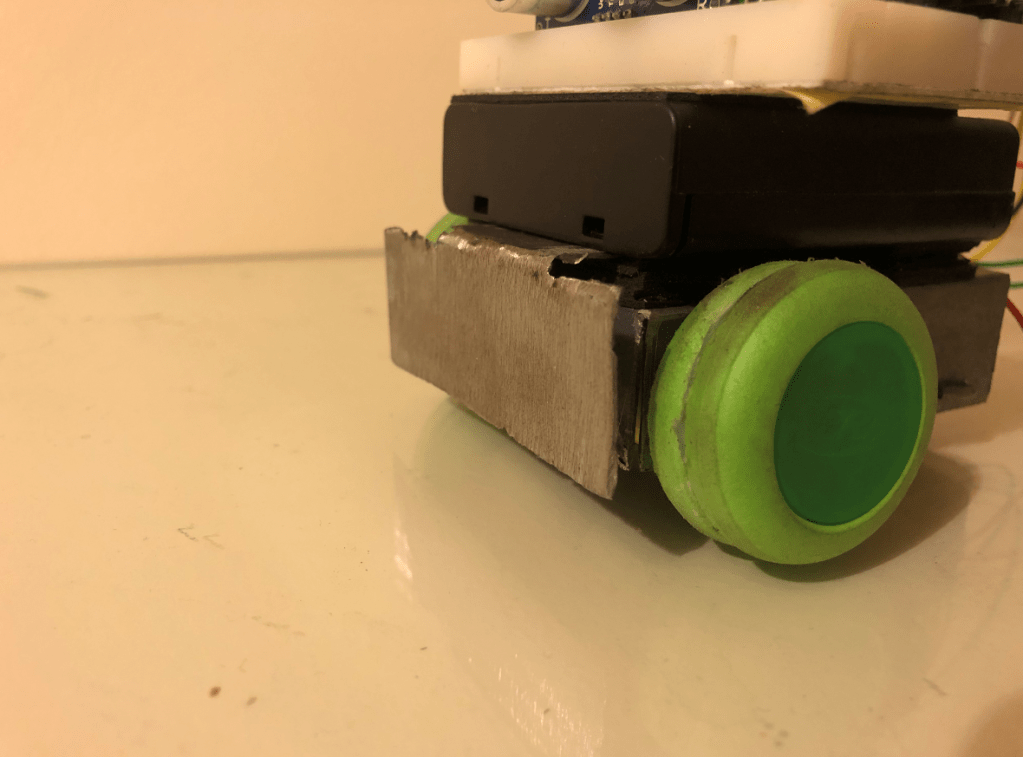
After doing this, another competitor gave us the old wheels off his which were bigger. This helped our robot travel faster but the wheels didn’t have sufficient grip to press the switch so we failed the first attempt with the new wheels. We solved this by using a section of an inner tube to increase traction. We had a significant improvement but we realized other teams were using 9V power so Ben left to buy a 9V battery. We kept the arduino and sensors running off 6V power so that we would not have to re wire the whole system. We added the 9V power to the quad half H bridge chip in order to power the motors. This sped up the robot greatly and significantly dropped our completion time.We were hoping for better results however our final result was acceptable. If we had jumped to 9V power sooner, we feel we could’ve gained a few positions. We ended up with a time of 7.27 seconds which gave us a final ranking of 5th place. Unfortunatly we dont have a video of the best attempt.